

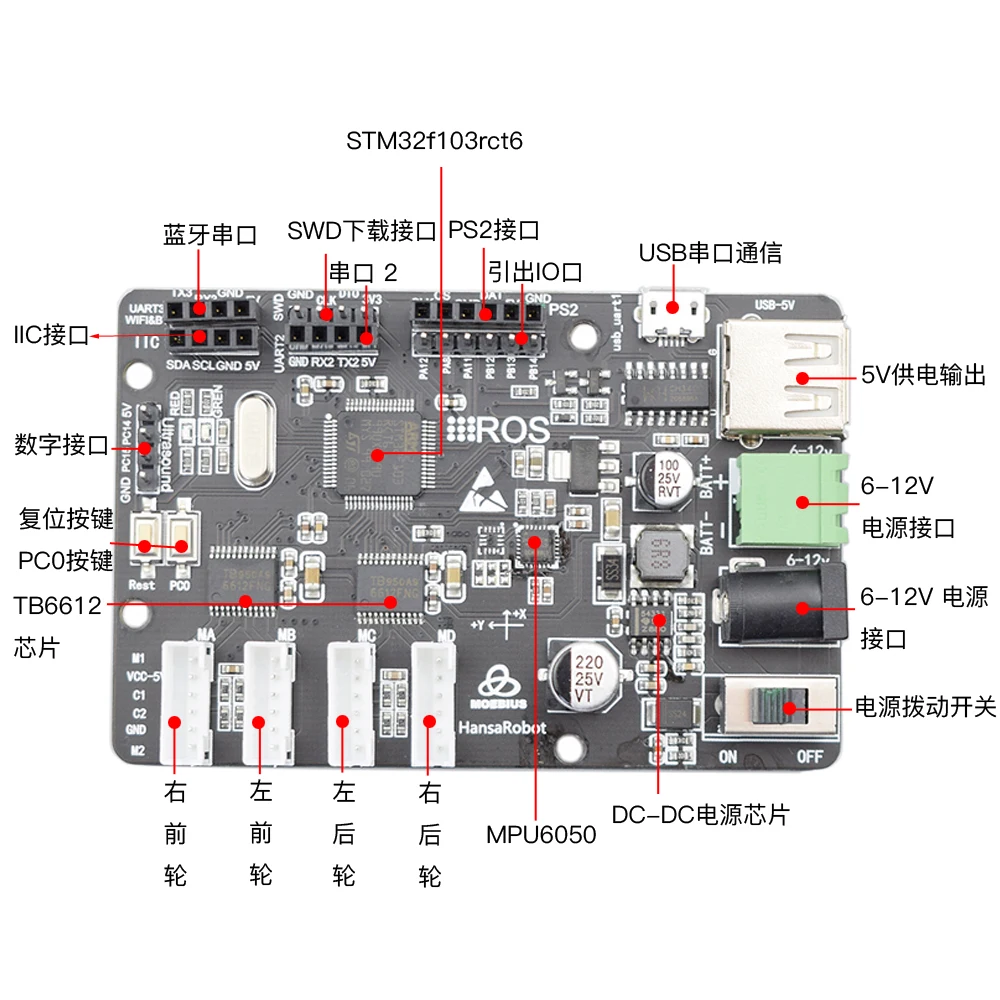



Panneau de commande PID en boucle fermée, pour ROS Mecanum Wheel Robot, codeur de vitesse de voiture, programme Open Source, 2023
€ 73.47
€ 77.34
Save € 3.87
-5%
IN STOCK
Pas cher et discount Panneau de commande PID en boucle fermée, pour ROS Mecanum Wheel Robot, codeur de vitesse de voiture, programme Open Source, 2023 en gros. Achetez directement à partir de HansaRobot Store.
Profitez des avantages suivants :
🤑 Enregistrer € 3.87
📦 Livraison gratuite dans le monde entier
❤️ Haute Qualité
🏠 Retour facile
💰 Garantie de remboursement
Caractéristiques
SKU:
ATS4001157096299
Boutique:
HansaRobot Store
Catégorie:
Jouets et loisirs
Sous-catégorie:
Jouets high-tech
Remise:
-5%
Économisé:
€ 3.87
Frais d'expédition:
Gratuit
Les clients ont également consultéRecommandes
€ 37.71
€ 53.48
€ 54.40
€ 16.52
€ 20.04
€ 13.44
€ 77.72
€ 16.62
€ 111.02
€ 27.65
€ 50.45
€ 42.30
€ 0.97
€ 103.99
€ 55.95
€ 170.72
€ 159.36
€ 41.38
€ 140.48
€ 27.65
€ 87.13
€ 40.73
€ 30.81
€ 148.20
€ 114.04
€ 45.70
€ 131.32
€ 50.90
€ 31.83
€ 114.48
€ 56.51
€ 10.44
€ 30.81
€ 15.86
€ 112.80
€ 21.60
€ 2,287.78
€ 231.54
€ 65.43
€ 10.23
€ 0.97
€ 8.99
€ 10.23
€ 6.91
€ 149.29
€ 53.92
€ 62.61
€ 116.12